Abstrakt: Obtí?nost zpracování robotického laserového plátování pro zpracování slo?itych obrobk?, jako jsou ?epele, spo?ívá ve vyu?ití vysoce p?esnych charakteristik a vyhody technické architektury iRobotCAM zalo?eného na jádru 3D CAD mohou efektivně splnit po?adavky na vysokou p?esnost, aby bylo mo?né realizovat vysoce p?esné laserové zpracování plátování pětiosych ?epelí.
Design a zpracování lopatek je t?eba p?izp?sobit konkrétním scéná??m podle r?znych aplika?ních scéná??, od malych lopatek ventilátoru a? po lopatky pro letectví, podle r?znych scéná?? pou?ití pr?myslovych produkt?, konstruk?ní prvky jsou r?zné, některé vy?adují orientaci na krásu, některé vy?adují zalo?ené na tichu, některé vy?adují zalo?ené na vykonu a zda lopatka kone?ně vyhovuje pot?ebám r?znych pr?myslovych odvětví, stejně jako po?adavky na r?zné zp?soby ?ízení, jádrem je pouze precizní zp?sob ?ízení, základem je p?esnost aby vyhovovaly pot?ebám r?znych scéná??. Vezmeme-li jako p?íklad robotické laserové zpracování plátování lopatek, iRobotCAM vyu?ívá svou architekturu zalo?enou na CAD a má vyhody vysoce p?esné architektury, jak ji efektivně aplikovat na zpracování laserového plátování?
Pro aplikace robotického laserového zpracování je obvykly proces následující:
Import robota a obrobku> umístění obrobku a kalibrace robota> realizace programování trajektorie> simulace v?ech scén> vystup kódu a zpracování robotem
- Pomocí charakteristik iRobotCAM zalo?eného na 3D CAD platformě a pohledu na 3D m??ete rychle vytvo?it digitální model scéná?e aplikace robota.
- Pomocí elektromechanického modulu iRobotCAM a p?ednastavené knihovny robot? m??ete definovat relevantní roboty, nástroje atd. pro scénu robota
- Podle pot?eb procesu laserového zpracování jsou generovány r?zné 2-osé a? 5-osé trajektorie, aby byly splněny po?adavky na trajektorie specifickych scéná??
- Na základě fyzikálního enginu iRobotCAM je pohyb robota simulován, kalibrován a je vydán odpovídající prováděcí kód.
Kromě technické architektury nejp?íměj?í u?ivatel vnímá, jak snadné je programování softwaru robota, a u?ivatelská zku?enost je jedním ze základních ukazatel?. Up?ímně ?e?eno, pokrok pr?myslového softwaru není práce na jeden den, ale od technické architektury a? po u?ivatelskou zku?enost domácí pr?myslovy software udělal v posledních letech velky pokrok, s tolika lety zahrani?ního softwaru m??ete vyzkou?et i domácí pr?myslovy software, pro vyběr softwaru pro offline programování robot? m??ete také vyzkou?et iRobotCAM.
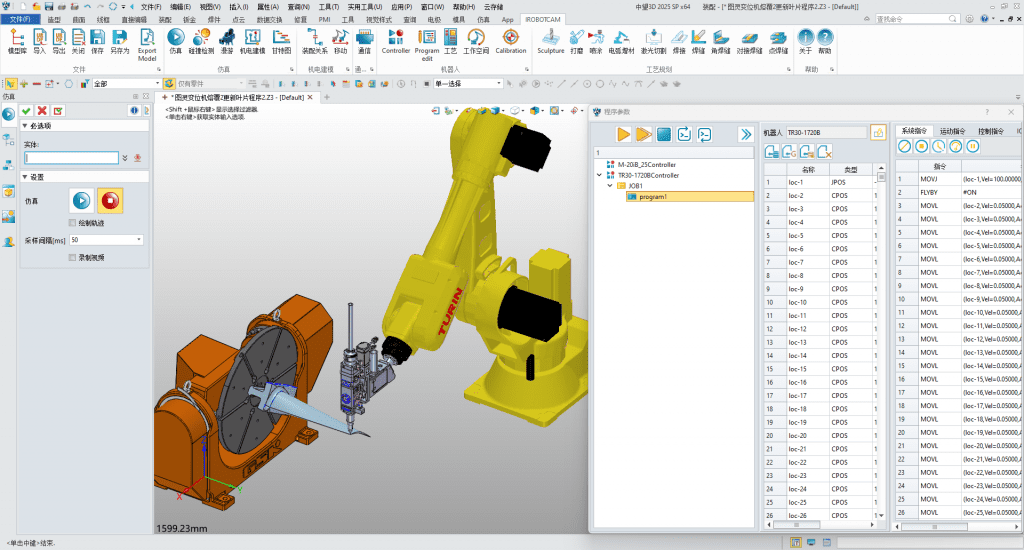
Vezmeme-li jako p?íklad pou?ití turínského robota k realizaci laserového zpracování oplá?tění pětiosych lopatek, jak iRobotCAM snadno realizuje robotické laserové zpracování krok za krokem?
O technologii Yueqing
Yueqing Technology se zavázala k vybudování otev?ené offline programovací platformy robot? iRobotCAM, co? je digitální ?e?ení integrující elektromechanicky koncep?ní návrh vyrobních linek, simulaci programování zpracování robot? a virtuální ladění.
Webové stránky iRobotCAM: www.bluebbwtube.com, kontakt: cooperation@iRobotCAM.com