Abstrakt: Robotické laserové zpracování je stále více vyu?íváno a rychlé programování a simulace technologie robotického zpracování m??e snadno ově?it správnost procesu. Jako zástupce domácího softwaru pro offline programování robot? m??e iRobotCAM pomocí p?átelského programovacího procesu iRobotCAM dosáhnout Pro programování proces? a ově?ování simulace dále poskytuje pohodlí obrábění laserového zpracování.
Zrod jakékoli technologie zpracování spo?ívá v ?e?ení ur?itych typ? problém? v pr?myslovych aplikacích. Aplikace laseru se stále více roz?i?uje, a to p?edev?ím proto, ?e p?i regulovatelné energii laseru lze realizovat slo?itěj?í technologii zpracování, tak?e je mo?né jej pou?ít v r?znych typech jednoduchého dvouosého a? pětiosého laserového ?ezání, nebo slo?itěj?ích leteckych a jinych díl?. Obor laserového sva?ování dále vyhovuje procesním pot?ebám r?znych typ? díl?. Pro lep?í vyu?ití robotického laserového zpracování jsou kromě hardwarovych mo?ností samotného laseru kladeny dal?í po?adavky na pohodlí a p?esnost trajektorií a simulací generování proces?.
Pro robotické laserové zpracování, vezmeme-li jako p?íklad obtí?e v technologii laserového ?ezání, existují zejména následující
- Nízká ú?innost polohování a korekce a ?patná adaptabilita : Metody polohování liniového laseru nebo polohování rezistoru mají svá omezení. Pr?se?ík ?árového laseru je citlivy na ru?ení a umístění rezistoru má po?adavky na umístění obrobku. Polohování a korekce Pokud dojde k odchylce v ulo?ení obrobku, je snadné polohování selhat. U velkych nebo slo?itych obrobk? je t?eba skenovat v?echny hrany jednu po druhé, co? je méně efektivní. A tyto metody obvykle poskytují pouze lokální korekci polohy a mají ?patnou adaptabilitu na obloukovité díly speciálního tvaru.
- Plánování trajektorie robota : P?esto?e programování trajektorie robota je flexibilní, v některych slo?itych nebo choulostivych ?eznych úlohách je stále problém, jak optimalizovat trajektorii pohybu robota za ú?elem zlep?ení efektivity a kvality ?ezání.
- údr?ba a kalibrace za?ízení : Roboty pro ?ezání laserem zahrnují více p?esnych sou?ástí, jako jsou laserové zá?i?e, senzory a robotická ramena. údr?ba a kalibrace těchto sou?ástí je zásadní pro udr?ení p?esnosti ?ezání a prodlou?ení ?ivotnosti za?ízení. Nicméně, jak provádět pravidelnou údr?bu a kalibraci a jak rychle reagovat na poruchy za?ízení, to v?e jsou problémy, kterym je t?eba ?elit v procesu robotického laserového ?ezání.
Jako offline programovací a simula?ní software pro roboty se iRobotCAM zamě?uje na procesní po?adavky robotického laserového zpracování a je zalo?en na akumulaci vyzkumu a vyvoje v oblasti sva?ování v posledních deseti letech.
- S vyu?itím ?kálovatelnosti trojrozměrné CAD platformy je realizována automatizace extrakce trajektorií laserového sva?ování a dále je dosa?eno p?esné kontroly laserovych trajektorií.
- S vyu?itím dlouholetych zku?eností s vyzkumem a vyvojem robotickych fyzikálních motor? m??eme rychle realizovat simulaci robotickych laserovych proces? a realizovat digitální dvoj?e obráběcího procesu.
- Pomocí modul? pro generování trajektorie a optimalizace trajektorie iRobotCAM lze trajektorii robota automaticky upravit, aby se zabránilo kolizím, singulárním bod?m a nedosa?itelnym bod?m.
- Kombinací návrhu vyrobní linky iRobotCAM s programováním a simulací robot? m??e iRobotCAM realizovat návrh a simulaci na úrovni vyrobní linky a dosáhnout tak integrace návrhu a simulace.
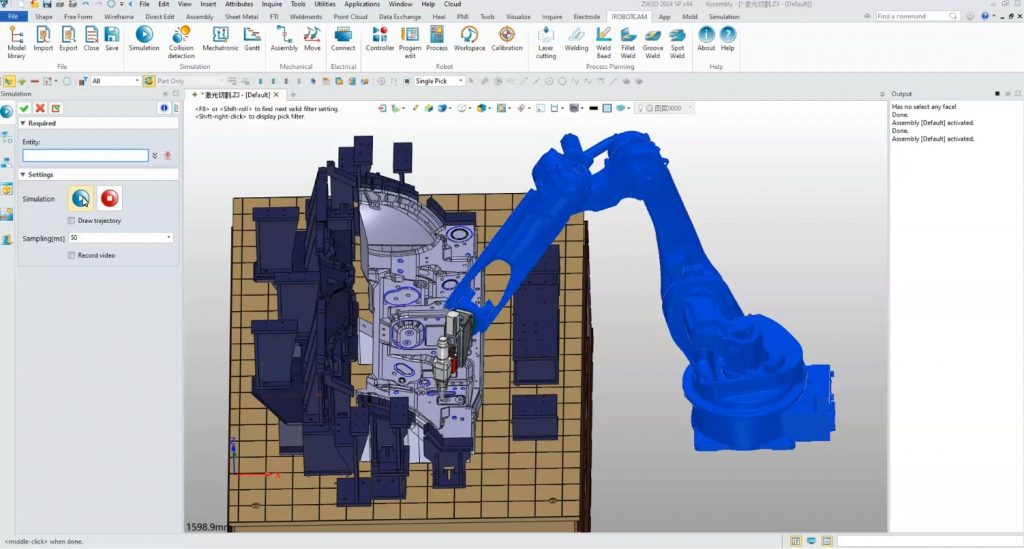
Poj?me se podívat, jak m??e iRobotCAM jednodu?e implementovat programování a simulaci robotického laserového zpracování.
O technologii Yueqing :
Yueqing Technology se zavázala k vybudování otev?ené offline programovací platformy robot? iRobotCAM, co? je digitální ?e?ení integrující elektromechanicky koncep?ní návrh vyrobních linek, simulaci programování zpracování robot? a virtuální ladění.