摘要: 機(jī)器人焊接司空見(jiàn)慣,深入汽車(chē),電子,航天,家具等各個(gè)行業(yè),而對(duì)于復(fù)雜的工件而言,一般會(huì)涉及到工業(yè)機(jī)器人與變位機(jī)協(xié)同編程與仿真,由于復(fù)雜度高,往往費(fèi)神費(fèi)力,本文主要介紹如何利用機(jī)器人離線編程軟件iRobotCAM來(lái)快速的實(shí)現(xiàn)高精度的編程與仿真,滿足復(fù)雜工件的高精度焊接。
機(jī)器人焊接的應(yīng)用已經(jīng)滲透到汽車(chē),電子,航天,家具等各個(gè)行業(yè),應(yīng)用場(chǎng)景多種多樣,而從技術(shù)的進(jìn)化路線圖上,主要包括手動(dòng)的示教編程,離線編程,免示教編程等。而如果我們進(jìn)一步歸納簡(jiǎn)化焊接的工藝,不外乎就是處理焊接軌跡,配合焊接工藝來(lái)完成焊接的工作,而從目前的焊接的行業(yè)應(yīng)用來(lái)看,不外乎就是以下兩種技術(shù)路線
- 簡(jiǎn)單的焊接:示教編程成為歷史,免示教成為主流,而視覺(jué)技術(shù),激光跟蹤技術(shù)等的應(yīng)用,也進(jìn)一步的加速激光的定位與焊接同步協(xié)同的可能性,不斷的滿足各類(lèi)細(xì)分的焊接場(chǎng)景的需要。
- 復(fù)雜的焊接:一般涉及到的是高精度,變位機(jī)協(xié)同等場(chǎng)景,考驗(yàn)的是對(duì)于高精度的軌跡的控制與焊接機(jī)器人的工藝配合來(lái)完成復(fù)雜的焊接。
而隨著國(guó)產(chǎn)工業(yè)軟件的持續(xù)突破,對(duì)于高精度的焊接的解題思路上,以國(guó)產(chǎn)機(jī)器人離線編程軟件iRobotCAM為例,選擇基于CAD的架構(gòu)上來(lái)解決復(fù)雜的高精度的軌跡生成及控制問(wèn)題,從而從根源來(lái)提供了高精度的解題方法。
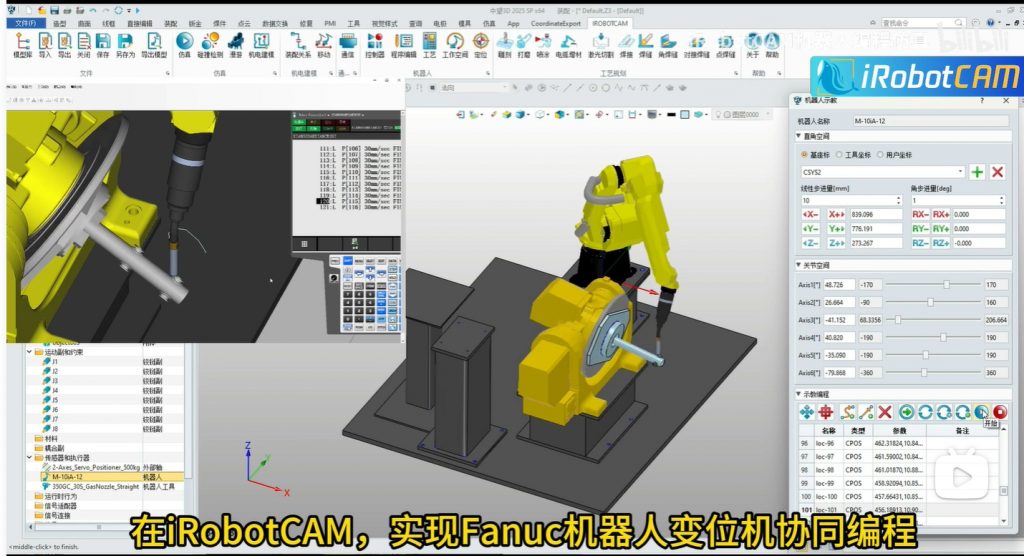
我們以發(fā)那科工業(yè)機(jī)器人與變位機(jī)協(xié)同編程為例,來(lái)進(jìn)一步闡述iRobotCAM如何實(shí)現(xiàn)復(fù)雜工件的焊接編程與仿真的。
- iRobotCAM基于三維幾何引擎中望3D,可以生成焊縫,實(shí)現(xiàn)焊縫的快速拾取或自動(dòng)拾取,實(shí)現(xiàn)焊縫數(shù)據(jù)的高精度保障。
- iRobotCAM基于CAM的五軸軌跡策略,豐富的軌跡方法,可以自動(dòng)生成任意復(fù)雜的焊接編程軌跡,滿足不同行業(yè)各類(lèi)特定軌跡的需求。
- iRobotCAM基于多軸聯(lián)動(dòng)的技術(shù)架構(gòu)及可靠的物理引擎,可以實(shí)現(xiàn)工業(yè)機(jī)器人與變位機(jī)的聯(lián)動(dòng),從而實(shí)現(xiàn)協(xié)同編程與仿真。
易用性無(wú)穎是復(fù)雜焊接的的考點(diǎn),我們通過(guò)一個(gè)視頻,針對(duì)復(fù)雜的管頭等零件,來(lái)一探iRobotCAM是如何實(shí)現(xiàn)快速上手,實(shí)現(xiàn)發(fā)那科工業(yè)機(jī)器人與變位機(jī)協(xié)同焊接編程與仿真的。
關(guān)于南京越擎信息科技有限公司
南京越擎科技致力于打造開(kāi)放的iRobotCAM機(jī)器人建模,編程與訓(xùn)練平臺(tái),是集產(chǎn)線機(jī)電概念設(shè)計(jì),虛擬調(diào)試,機(jī)器人建模與訓(xùn)練等一體的數(shù)字化解決方案.
iRobotCAM網(wǎng)站: www.bluebbwtube.com,聯(lián)絡(luò)郵件: cooperation@iRobotCAM.com