Návrh robot?/návrh vyrobní linky/offline programování/virtuální uvedení do provozu
Spolehlivy fyzikální simula?ní engine
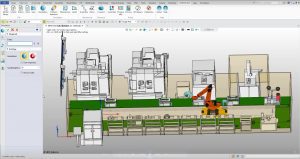
Virtuální uvedení do provozu s více pracovními stanicemi
Otev?ená architektura integrace proces?
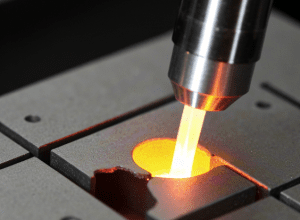
Rychle integrujte p?izp?sobené procesní moduly
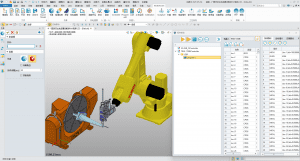
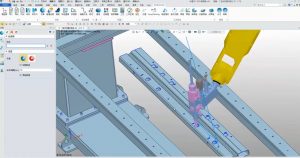
Návrh a simulace robot?
Podporuje import desítek datovych formát? v?etně Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid atd.;
Podporuje definici kloub? robota, ?ízení signál? atd.
Podporuje import nebo export URDF, podporuje export parametr? kloub?, setrva?nosti a dal?ích parametr? a usnadňuje pou?ití robotickych systém?, jako jsou systémy ROS nebo simula?ní tréninkovy software;
iRobotCAM má kompletní dynamicky engine, ktery zaji??uje, ?e vystupní URDF splňuje simula?ní po?adavky softwaru, jako je ROS.
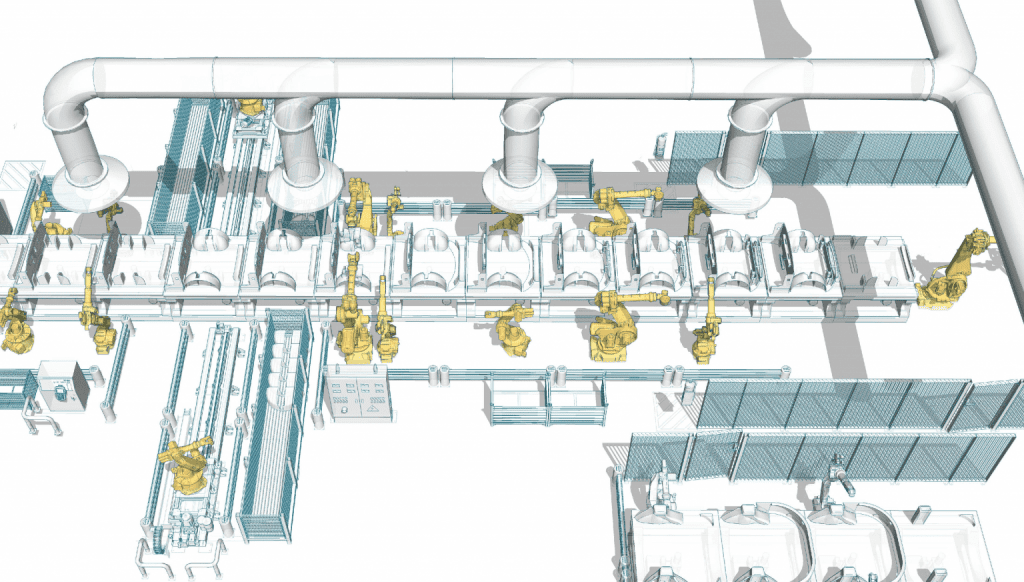
Konstrukce robotické vyrobní linky
Pou?ijte software pro parametricky návrh, abyste splnili návrh jednotlivych robotickych pracovních stanic a vyrobních linek robot?.
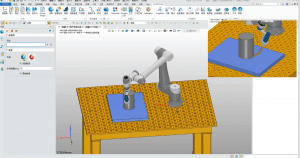
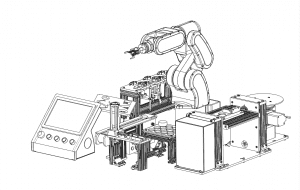
Offline programování robota
Proces programování v kancelá?i: Import modelu robota–>Plánování procesu–>Simulace procesu obrábění–>Optimalizace systému pracovní stanice–>Vystup PS?
Ově?ení programování: Podpora dekompilace programu robota, která m??e ově?ovat a optimalizovat programy robota
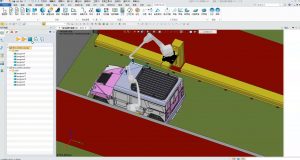
Virtuální uvedení robota do provozu
Díky virtuálnímu ladění a virtuálnímu monitorování lze synchronizovat akce virtuálního robotického systému a skute?ného robotického systému;
Podporuje simulaci IO komunikace více stroj?, synchronizaci více robot? a plánování víceosého propojení robot?.