Unterstützt den Import von Dutzenden von Datenformaten, darunter Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid usw.;
Unterstützt die Definition von Robotergelenken, Signalsteuerung usw.
Unterstützt den URDF-Import oder -Export, unterstützt den Export von Gelenk-, Tr?gheits- und anderen Parametern und erleichtert die Verwendung von Robotersystemen wie ROS-Systemen oder Simulationstrainingssoftware;
iRobotCAM verfügt über eine vollst?ndige Dynamik-Engine, um sicherzustellen, dass die Ausgabe-URDF die Simulationsanforderungen von Software wie ROS erfüllt.
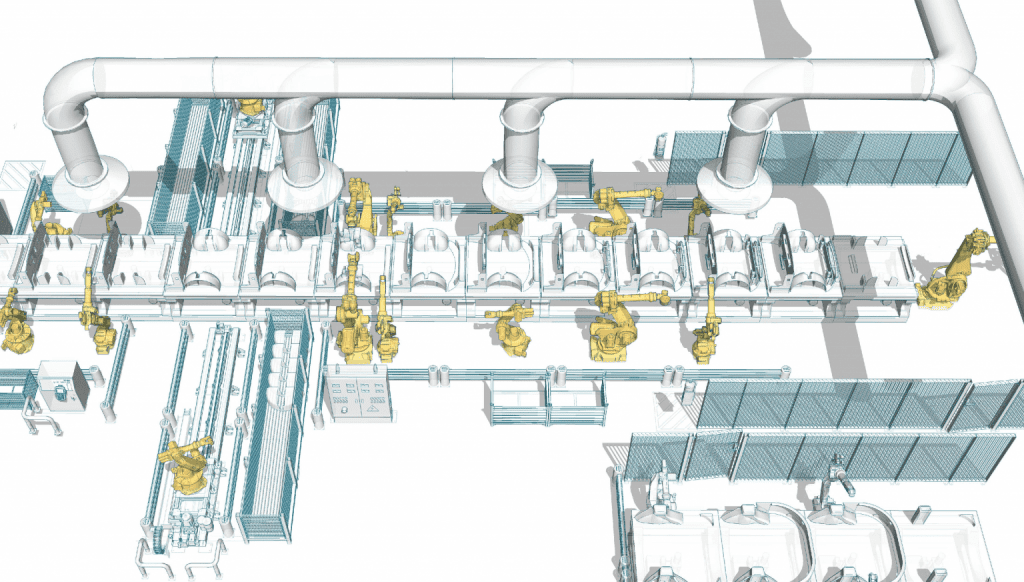
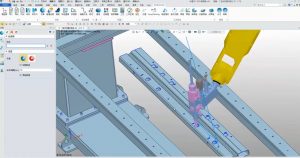
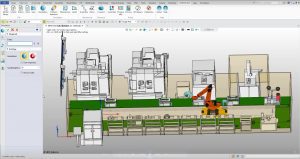
Entwurf einer Roboter-Produktionslinie
Verwenden Sie parametrische Designsoftware, um das Design einzelner Roboterarbeitspl?tze und Roboterproduktionslinien zu erfüllen.
Programmierüberprüfung: Unterstützt die Dekompilierung von Roboterprogrammen, wodurch Roboterprogramme überprüft und optimiert werden k?nnen
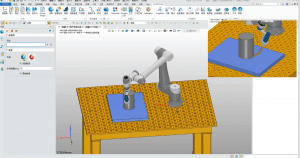
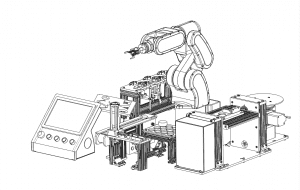
Virtuelle Inbetriebnahme von Robotern
Ausgestattet mit virtuellem Debugging und virtueller überwachung k?nnen die Aktionen der virtuellen Robotersystem-Arbeitsstation und der tats?chlichen Robotersystem-Arbeitsstation synchronisiert werden.
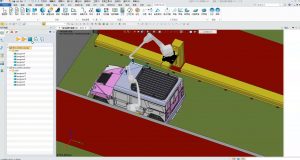
Unterstützt die Simulation der E/A-Kommunikation mehrerer Maschinen, die Synchronisierung mehrerer Roboter und die Planung der mehrachsigen Roboterverbindung.