H? tr? nh?p ho?c xu?t URDF, h? tr? xu?t kh?p n?i, quán tính và các th?ng s? khác, ??ng th?i t?o ?i?u ki?n thu?n l?i cho vi?c s? d?ng các h? th?ng robot nh? h? th?ng ROS ho?c ph?n m?m ?ào t?o m? ph?ng;
iRobotCAM có m?t c?ng c? ??ng l?c h?c hoàn ch?nh ?? ??m b?o URDF ??u ra ?áp ?ng ???c các yêu c?u m? ph?ng c?a ph?n m?m nh? ROS.
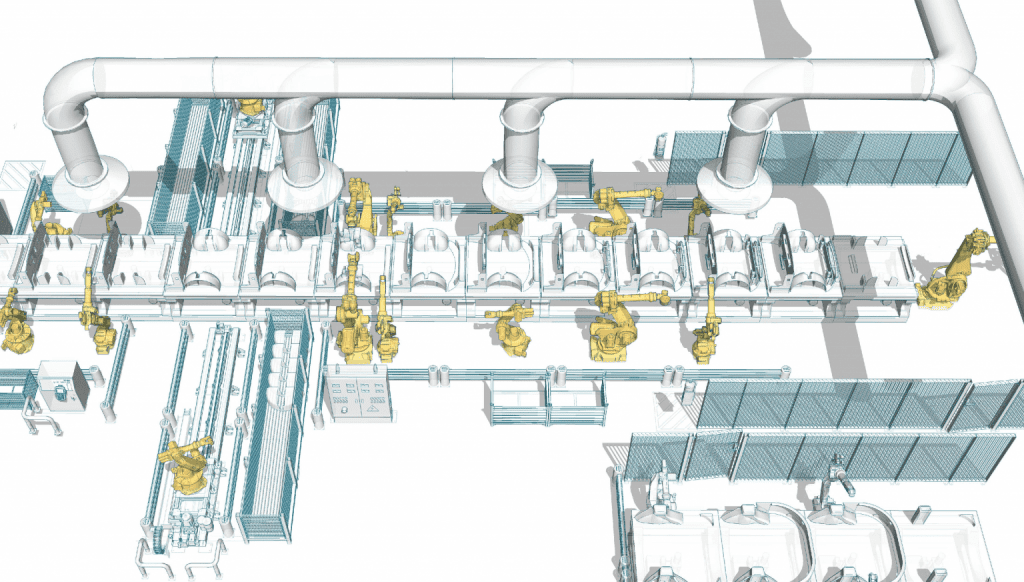
Thi?t k? day chuy?n s?n xu?t robot
S? d?ng ph?n m?m thi?t k? tham s? ?? ?áp ?ng thi?t k? các tr?m làm vi?c robot ??n l? và day chuy?n s?n xu?t robot.
L?p trình robot ngo?i tuy?n?
Quy trình l?p trình v?n phòng: Nh?p m? hình robot–>L?p k? ho?ch quy trình–>M? ph?ng quy trình gia c?ng–>T?i ?u hóa(chǎn) h? th?ng máy tr?m–>Xu?t m? b?u chính
Xác minh l?p trình: H? tr? d?ch ng??c ch??ng trình robot, có th? xác minh và t?i ?u hóa(chǎn) các ch??ng trình robot
Robot ?o
???c trang b? ch?c n?ng g? l?i ?o và giám sát ?o, các hành ??ng c?a tr?m làm vi?c h? th?ng robot ?o và tr?m làm vi?c h? th?ng robot th?c t? có th? ???c ??ng b? hóa(chǎn);


試.png)