Поддерживает импорт десятков форматов данных, включая Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid и т. д.;
Поддерживает определение сочленений робота, управление сигналами и т. д.
Поддерживает импорт или экспорт URDF, поддерживает экспорт параметров соединений, инерции и других параметров, а также облегчает использование робототехнических систем, таких как системы ROS или программное обеспечение для имитационного обучения;
iRobotCAM имеет полноценный динамический движок, гарантирующий, что выходной URDF соответствует требованиям моделирования программного обеспечения, такого как ROS.
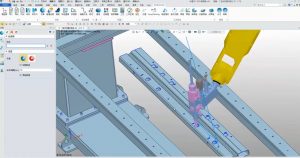
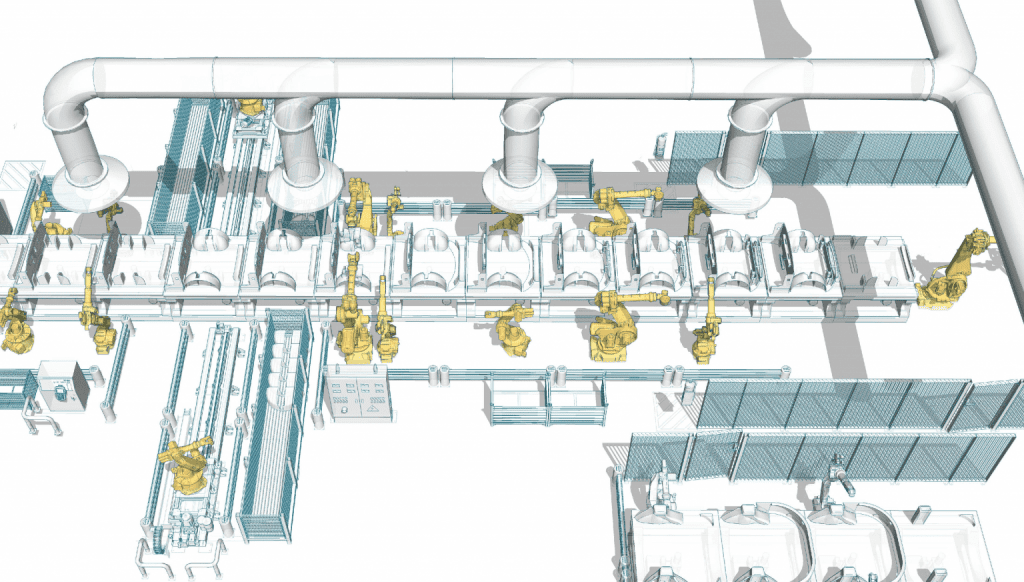
Проектирование линии по производству роботов
Используйте параметрическое программное обеспечение для проектирования отдельных роботизированных рабочих станций и линий по производству роботов.
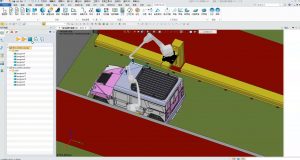
Программирование робота в автономном режиме
Процесс офисного программирования: Импорт модели робота–>Планирование процесса–>Моделирование процесса обработки–>Оптимизация системы рабочей станции–>Вывод почтового индекса
Проверка программирования: поддержка декомпиляции программ роботов, которая позволяет проверять и оптимизировать программы роботов.
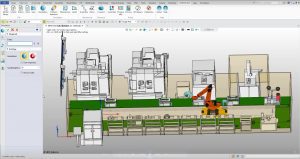
Виртуальный ввод в эксплуатацию робота
Благодаря виртуальной отладке и виртуальному мониторингу действия рабочей станции виртуальной роботизированной системы и реальной рабочей станции роботизированной системы могут быть синхронизированы;
Поддерживает моделирование многомашинной связи ввода-вывода, синхронизацию нескольких роботов и планирование многоосевых связей роботов.